|
|
||||||||||||
|
Lunes 29 de septiembre de
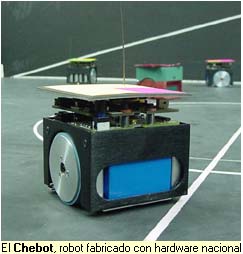
2003 El año pasado, nuestro país participó por primera vez en el mundial de futbol robótico representado por un equipo del Departamento de Computación de la FCEyN. En aquella oportunidad el equipo UBASOT alcanzó una meritoria actuación en las dos categorías donde intervino. Este año, el grupo liderado por Juan Santos, vuelve a la carga con sustanciales novedades: participarán en cuatro categorías y, por primera vez en un encuentro de esta naturaleza, debutará el Chebot, una familia de robots desarrollados con tecnologías nacionales. Por
Ignacio Uman (*)
Simultáneamente se está llevando a cabo el Congreso Mundial de Robótica e Inteligencia Artificial, cuya intención es dar a conocer las tecnologías utilizadas por los participantes. Allí UBA-SoT expondrá sus desarrollos. El objetivo del fútbol de robots es promover el intercambio en tecnologías aplicables a cuestiones de gran impacto social, por ejemplo tareas de rescate, manipulación de elementos tóxicos o explosivos, etc. que involucran la resolución de problemas complejos. UBA-SoT está conformado por estudiantes y docentes que se desempeñan en el Grupo de Inteligencia Computacional Aplicada a Robótica Cooperativa. Integran el equipo: Javier Barra, Patricia Borensztejn, Ariel Curiale, Héctor Fassi, Juliana Gambini, Julio Jacobo, Andrea Katz, Marta Mejail, Juan Rojas, Juan Santos, Flavio Scarpettini, Sergio Soria, Andrés Stoliar y Demián Wassermann. El grupo está dirigido por Juan Santos y abarca tres áreas de trabajo: VER (Visión en Robótica), DAR (Diseño de Arquitecturas del Computador) y COCO (Coordinación y Control). Luego de los resultados obtenidos en el mundial del año pasado celebrado en Corea, el UBA Team no tuvo nada que envidiarle a las potencias futbolísticas mundiales: llegó a los cuartos de final en robots reales y quedó tercero en simulación ocupando la primera posición del mundo occidental en esta última categoría. Este año hay importantes novedades. El equipo diseñó sus propios robots con hardware nacional, desarrolló un nuevo sistema de visión, implementó un nuevo sistema de coordinación y control y está compitiendo en cuatro categorías: KheperaSot (1 vs. 1, robots cilíndricos de un diámetro máximo de 6 centímetros, con ordenador y cámara de video incorporados), MiroSot Middle League ( 5 vs. 5, robots cúbicos de 7,5 centímetros de lado), MiroSot Large League (7 vs. 7, robots con las mismas carácterísticas que la categoría Mirosot Middle League) y SimuroSot Middle League (5 vs. 5, robots simulados en un ordenador). Creo que el mundial va a ser un test muy fuerte porque son muchos los cambios que hemos introducido, pero esos cambios no están en función de poder participar en una categoría u otra sino en abrir nuevas líneas de trabajo e investigación señaló Juan Santos, horas antes del viaje a Austria. Robots made in Argentina El año pasado el equipo argentino participó en el mundial de Corea con software propio y hardware comprado en el exterior, más precisamente robots coreanos Yujin. Pero este año las cosas son diferentes: los robots de UBA-SoT poseen hardware nacional y será la primera vez que un equipo de Latinoamérica se presente con este desarrollo propio. El robot diseñado por la UBA, que actuará en tierras austríacas para las categorías de MiroSot, se llama CheBot. Este robot posee una placa de comunicación que recibe los comandos de la computadora mediante un radiotransmisor o un cable serial y una placa de control que es el circuito donde están los dos motores que hacen girar las ruedas puntualizó Patricia Borensztejn. Una de las características sobresalientes de CheBot es que, a diferencia del robot utilizado anteriormente con un motor continuo, posee lo que se denomina un motor paso a paso con perfil de velocidad, que hace más eficiente el control de los movimientos. La PC transmite un conjunto de velocidades establecidas para todos los robots. Los motores pueden alcanzar progresivamente la velocidad deseada, con lo cual nunca hay un defasaje temporal porque todos los robots pueden ejecutar los mismos comandos al mismo tiempo comentó Borensztejn. Cabe recalcar que este robot es multifacético: presenta una configuración básica para jugar al futbol, pero además puede utilizar otras configuraciones aplicadas a la investigación y la educación, lo que lo hace aún más interesante. Fútbol robótico innovador Según el sistema tradicional de visión de UBA-SoT cada robot posee dos parches cuadrados de colores, uno identificando al equipo y el otro al robot. A través de la visión global una cámara de video fijada sobre el campo de juego envía información al sistema de control acerca de la posición de los robots del equipo propio, de los robots del equipo contrario y de la pelota. Lo que agregamos este año es un sistema con contornos activos donde cada parche del robot tiene una figura geométrica y ajustamos a cada una de esas figuras una curva determinada en un plano. El sistema detecta el contorno de esos objetos, ajusta su posición y puede hacer un tracking o seguimiento en la pantalla cuadro por cuadro elaborando predicciones, lo que de alguna manera resulta más eficiente recalcó Marta Mejail.
En el aspecto de coordinación y control, hay una novedad en la categoría de simulación. El año pasado los robots simulados tenían un rango de movimiento fijo mientras que este año desarrollamos un equipo con roles dinámicos y formación dinámica, esto significa que si es necesario los robots pueden rotar, cubrir e intercambiar distintas posiciones señaló Héctor Fassi. Otras modificaciones importantes son: el desarrollo de una cámara propia e interfaces para dos tipos de robots, un nuevo sistema de control de navegación y un nuevo sistema de coordinación y predicción para el movimiento de la pelota. Según Juan Santos el principal objetivo de este grupo de investigación es avanzar en el conocimiento de la inteligencia computacional y la robótica. Para nosotros el hecho de haber trabajado y desarrollado todos estos temas y llegado a esta instancia ya es un resultado muy importante. Veremos qué sucede en la competencia concluyó.
|
||||||||||||


 Por
segunda vez consecutiva el equipo argentino de fútbol de robots UBA-SoT
(UBA-Soccer Team), del Departamento de Computación de la FCEyN, está
participando en un certamen mundial. El Campeonato Mundial de Fútbol
de Robots cuya sede es Viena, Austria, comenzó el domingo 28 de septiembre
y se extenderá hasta el 3 de octubre. Este evento es organizado anualmente
por la FIRA (Federation of International Robot-soccer Association)y
participan equipos de América, Asia, Europa y Oceanía.
Por
segunda vez consecutiva el equipo argentino de fútbol de robots UBA-SoT
(UBA-Soccer Team), del Departamento de Computación de la FCEyN, está
participando en un certamen mundial. El Campeonato Mundial de Fútbol
de Robots cuya sede es Viena, Austria, comenzó el domingo 28 de septiembre
y se extenderá hasta el 3 de octubre. Este evento es organizado anualmente
por la FIRA (Federation of International Robot-soccer Association)y
participan equipos de América, Asia, Europa y Oceanía.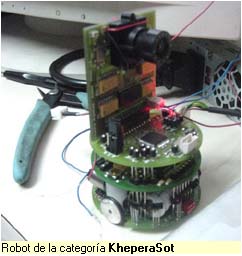 Para
los robots Khepera, de procedencia suiza, el sistema de visión es
local. El robot tiene su propia cámara de video y su propio procesamiento
de la imagen. En este caso se ve el movimiento del robot y de la cámara
(que sería como el ojo del robot) que al no estar fija asume distintas
perspectivas y hace movimientos de paneo agregó Mejail.
Para
los robots Khepera, de procedencia suiza, el sistema de visión es
local. El robot tiene su propia cámara de video y su propio procesamiento
de la imagen. En este caso se ve el movimiento del robot y de la cámara
(que sería como el ojo del robot) que al no estar fija asume distintas
perspectivas y hace movimientos de paneo agregó Mejail.