|
|
||||||||||||||
|
Martes 9 de diciembre de 2003 Este año nuestro país participó nuevamente en el mundial de fútbol de robots, representado por el equipo UBASot del Departamento de Computación de la FCEyN. El evento, organizado anualmente por la Federation of International Robot-soccer Association (FIRA), se desarrolló a fines de septiembre en Viena, Austria, y reunió a países de América, Asia, Europa y Oceanía. La actividad tiene como objetivo promover el intercambio en robótica e inteligencia artificial (IA). Por
Ignacio Uman (*)
El año pasado UBASot tuvo una brillante actuación en el mundial de fútbol de robots de Corea. En aquella oportunidad se adjudicó el tercer puesto en la categoría de simulación y llegó a los cuartos de final en robots reales. Pero este año los resultados de la competencia en Austria fueron adversos para el UBA team, quedó en las últimas posiciones de las categorías donde participó. Más allá de la competencia misma, el trabajo de este grupo de investigación presenta desarrollos muy novedosos a nivel científico y tecnológico. En una charla a fondo con Cable Semanal, Juan Miguel Santos -doctor en Computación y director del Grupo de Inteligencia Computacional aplicada a Robótica Cooperativa- reflexiona sobre la experiencia que dejó el mundial y da a conocer interesantes desafíos que debe afrontar un investigador en cuya agenda figura una actividad como el fútbol de robots. Cable Semanal: -¿Cómo fueron los días de preparación previos al mundial?
Juan Miguel Santos: - Muy intensos. Las seis personas que viajamos -Javier Barra (tesista), Juan Santos (docente), Flavio Scarpettini (graduado), Sergio Soria (tesista), Andrés Stoliar (pasante alumno) y Demián Wassermann (pasante alumno)- salimos el 24 de septiembre al mediodía pero, siendo las siete de la mañana de ese día, el equipo todavía estaba en la Facultad desde el día anterior preparando y probando cosas. En el grupo también trabajan Patricia Borensztejn (docente), Ariel Curiale (pasante alumno), Héctor Fassi (graduado), Juliana Gambini (jefe de TP), Julio Jacobo (docente), Andrea Katz (pasante alumno), Marta Mejail (docente) y Juan Rojas (tesista). En Austria continuamos lo que nos quedó pendiente. Finalmente llegó el día de la competencia en el Centro de Exposiciones de Viena y participamos en cuatro categorías: Robots Reales 5 vs. 5 y 7 vs. 7, Simulación 5 vs. 5 y Robots Khepera (MiroSot Middle League, MiroSot Large League, SimuroSot Middle League y KheperaSot). Además teníamos que presentar cinco artículos en el congreso de robótica (FIRA World Congress), hacer la preparación previa de cada partido, lo que tiene que ver con los aspectos absolutamente técnicos y, en medio de cada encuentro, revisar cada detalle. C.S.: -¿Con qué se encontraron a la hora de competir? J.M.S.: -Nosotros teníamos la expectativa de que el comité de la competencia iba a tener una organización mejor que la del mundial del año pasado en Corea. Realmente la organización tenía serias dificultades: el cronograma de la competencia en las distintas categorías no sólo cambiaba todos los días sino que nos adelantaban o retrasaban partidos, y no teníamos acceso a Internet. En realidad el mayor problema que se nos presentó fue la iluminación. C.S.: -¿Podría dar detalles? J.M.S.: -La primera vez que tuvimos que calibrar nuestro equipo antes del primer partido contra Corea nos encontramos con que el sistema de iluminación del lugar donde se jugaron los partidos tenía serios problemas: 1) Según el reglamento el piso del campo de juego tiene que ser de pintura no reflectante y en este caso no lo era. 2) La luz proyectada sobre la cancha no era homogénea (también el reglamento habla al respecto). Si dividimos la cancha en cuatro áreas, los dos plafonds de tubos fluorescentes caían sobre dos áreas solamente (dos óvalos de luz) y las otra dos que estaban a los costados tenían una intensidad mucho menor. 3) El nivel de luz era bajo (no llegaba a 1000 lux, ni mucho menos, que es lo reglamentario). 4) La iluminación ambiente era mayor que la iluminación dentro la cancha, tan es así que se veían sombras en el campo de juego. 5) Había una pantalla gigante donde se transmitía el partido; cuando se prendía tenía una imagen con mucha luminosidad y cambiaba la iluminación de la propia cancha. Cuando el ojo humano ve todo esto no lo percibe con demasiado detalle pero la cámara de video sí. En particular nuestro sistema de visión está basado en el concepto de contornos activos. Este concepto es muy interesante, pero depende mucho de cómo se puede identificar la mancha de color del parche que está ubicado sobre el robot. Si uno calibra el color del robot en un sector de la cancha y en otro sector la luz es mayor, el color se quema por el exceso de luz. En otros sectores donde hay menor iluminación, directamente no se ve, o se dificulta identificar al robot. Este problema lo sufrieron en mayor o menor medida todos los equipos: en este momento tengo presente a México, Holanda y Corea -el equipo Kinggo de Corea jugó la final con cinco robots en lugar de siete porque no podía identificarlos- en especial en la categoría de 7 contra 7, MiroSot Large League. En nuestro caso, la iluminación hizo que automáticamente el sistema de control envíe un comando que hace que los robots se detengan cuando el sistema de visión no los reconoce durante más de 330 milisegundos. Este comando es una protección. También desaparecía la pelota, o no había suficiente contraste entre el color magenta del robot y el anaranjado de la pelota. En general no se respetaron las condiciones reglamentarias. Eso influyó definitivamente en nuestros resultados. A pesar de todo esto, en América seguimos siendo el equipo mejor posicionado y quedamos cuartos en 7 vs. 7 y octavos en 5 vs. 5. C.S.: -¿Pudieron presentar algún reclamo por las dificultades de iluminación? J.M.S.: -Sí, hicimos una solicitud informal detallando los problemas que existían y luego hicimos una presentación formal ante el presidente del evento, Dr. Man-Wook Han, Institute for Handling Devices and Robotics, Vienna University of Technology. Nos dijo que "entendía que existía el problema" y que "iba a intentar solucionarlo". Pero no lo pudieron solucionar, en especial porque no es sencillo armar un nuevo sistema de iluminación en medio de la competencia. C.S.: ¿Cómo se plasmaron algunas de las nuevas líneas de trabajo de este año? J.M.S.: -En la categoría Khepera-Sot era la primera vez que competíamos. El desarrollo del robot para competir fue liderado por Javier Barra con la colaboración de Andrés Stoliar. Hicieron una excelente tarea. Uno de los resultados de este último año fue que desarrollamos una cámara de video digital que el robot lleva incorporada en su interior, con sensor matricial o CCD como tiene cualquier videofilmadora o cámara de fotos. La cámara captura imágenes de 640 por 480 píxeles, a 30 cuadros por segundo, y es completamente programable. Lo que sucedió es que la cámara estuvo lista poco tiempo antes de la competencia pero, para conectarla al robot, hacía falta una interfase y lamentablemente Javier no pudo terminar todo el código de software que se necesitaba para comunicar el microprocesador del robot con el microcontrolador de la interfase. Y tuvimos que competir sin cámara, solamente con los sensores infrarrojos del robot. Algo para tener una cuenta es que si uno quiere comprar esta cámara en el mercado tiene un costo de aproximadamente 2500 dólares con interfase incluida. Pero, al desarrollarla nosotros, el costo del producto fue menor a los 500 dólares. Fue una experiencia muy valiosa implementar este desarrollo y hacerlo acá en el país. Los resultados en la competencia no fueron buenos pero, una de las cosas que rescato, es que la gente de otros equipos, por ejemplo de Australia y Estados Unidos, se quedó muy impactada con la cámara. Muchas de las universidades que participaron se mostraron muy interesadas por este desarrollo y quedamos en mandarle documentación al respecto. En particular la gente de la universidad austriaca de Innsbruck quiere que le prestemos la cámara, por lo que estamos en tratativas. C.S.: -¿Cuáles son las dificultades de diseñar una cámara de video digital en nuestro país? J.M.S.: -El principal obstáculo es el siguiente: desarrollar una cámara digital de video en Argentina implica hacer algo nuevo, y hacer algo nuevo cuando se combina hardware y software tiene sus dificultades, por ejemplo la dificultad para conseguir los componentes de fabricación, las herramientas para programar determinado microcontrolador, etcétera. C.S.: -Porque hay componentes que no se fabrican acá en Argentina.
C.S.: -Considerando el costo de esta cámara de video que ustedes desarrollaron, imagino que sería un negocio bastante rentable si se pudiese comercializar. J.M.S.: -Sin duda. Dentro de la Facultad hay una incubadora de empresas que se llama IncubaCEN (de la Fundación Ciencias Exactas y Naturales) donde los productos como el robot Chebot o la cámara digital están siendo desarrollados con la intención de generar un emprendimiento en el que se puedan comercializar y utilizarse para diversas aplicaciones (industriales, médicas, etcétera). Hay un problema en el medio, y es que nosotros somos investigadores y tenemos un límite: disponemos de las ideas, tomamos la iniciativa del desarrollo y lo llevamos a cabo, pero no tenemos el know how para generar una estrategia de marketing. Lo bueno es que hay muchos otros emprendimientos en la Facultad que se están llevando a cabo. C.S.: -Faltan políticas que avancen en esta dirección. J.M.S.: -Claro. Falta un proyecto de acuerdo entre el Estado, la industria y la universidad que permita aceitar estos mecanismos de transferencia. Por ejemplo, cuando estuvimos en Corea -en el mundial del año pasado- nos encontramos con una asociación de industrias en robótica, Korea Association of Robotics (KAR), que surge de varios años de inversión estatal y privada, y de acuerdos entre universidades y empresas. Eso nosotros no lo tenemos, y estamos convencidos de que es necesario y muy útil. Por lo cual, lo que hacemos es dar un paso en esa dirección. Creemos que si en algún momento aparecen iniciativas de inversión desde el Estado o alguna cámara empresaria o industrial, va a ser muy importante que ya haya una estructura incipiente. C.S.: -¿Cómo fue la tarea de desarrollar robots propios? J.M.S.: - Alguna gente nos dijo "y bueno, déjenlos, total qué daño pueden hacer a la sociedad". Finalmente los desarrollamos y funcionaron muy bien cuando el sistema de control podía manejarlos. El primer día, gente de otros países se acercó a ver nuestros robots, que tienen una tecnología basada en un nuevo tipo de motor y de control (paso a paso con caja de reducción, pasos de una décima de milímetros). En general no hay expectativas de que un país en vías de desarrollo lleve este tipo de productos a Austria. Para nosotros fue muy valioso desarrollar robots propios. De vuelta nos sucedió que al haber dedicado mucho tiempo en esta tarea no pudimos disponer del tiempo necesario para integrar absolutamente todo. Además desarrollamos un sistema de navegación superior al que utilizamos en Corea pero el sistema de navegación necesita la retroalimentación del sistema de visión, cosa que no tuvimos. C.S.: -¿Qué diferencias tiene este sistema de navegación con respecto al que utilizaron el año pasado? J.M.S.: -Básicamente, cuando un robot se desplaza, cambia su posición dentro del campo de juego. La cámara detecta este cambio, se lo informa al sistema de navegación y este sistema de navegación calcula para ese instante de tiempo las velocidades de las ruedas (izquierda y derecha). El sistema que teníamos antes daba una respuesta que demoraba en promedio entre 60 y 100 milisegundos y no era tan preciso. En cambio, al tener un sistema de navegación como el de este año que puede dar una respuesta en 8 milisegundos (a veces menos), deja 20 milisegundos al sistema para cumplir otras tareas y el robot se comporta de forma más precisa. Otra diferencia que hubo es que los robots Yujin que usamos el año pasado eran coreanos, y si los llevábamos a una velocidad superior a 80 centímetros por segundo, por problemas de control interno del robot, se comportaban de una forma no deseada; en cambio los robots que nosotros desarrollamos se pueden mover hasta 150 centímetros por segundo. Tienen una aceleración controlada y una velocidad efectiva mayor. C.S.: -En la categoría de robots simulados el año pasado ustedes fueron los campeones del mundo occidental ¿Qué sucedió esta vez? J.M.S.: -Por un lado, parte de la gente vinculada a Simulación, Héctor Fassi y Flavio Scarpettini, se abocó a trabajar en una nueva estrategia para los robots reales. Se desarrolló nuevamente un predictor de pelota, trabajo hecho por Juan Rojas -una tarea muy impresionante- y se desarrolló el nuevo método de navegación. El tema es que había que integrar al sistema toda esa porción de software y la nueva estrategia que implementamos. El propósito era hacer una nueva plataforma que tuviera todos esos desarrollos integrados. Ellos trabajaron muy bien y se volcaron bastante a esa tarea, les quitó bastante tiempo para el desarrollo del sistema de simulación. Entiendo que ese fue uno de los motivos por los que no se pudo obtener una mejor performance. Por otro lado, el equipo trabajó específicamente en simulación, hubo una evolución, se podía haber evolucionado más, lo que sucede es que uno puede ir y perder. C.S.: -¿Cree que en simulación hubo un crecimiento exponencial de los otros equipos? J.M.S.: -Probablemente. Lo interesante es que el equipo argentino que salió subcampeón en el Campeonato Argentino de Fútbol de Robots 2003 (CAFR 2003), del colegio Schöntal, después salió subcampeón mundial en la categoría de Simulación en Austria. Ese también fue otro de los objetivos de nuestro grupo: fomentar la actividad. Para eso se hizo el CAFR 2003. Los equipos SimulArlt, de Tortuguitas, y Schöntal, de Capital Federal, se motivaron mucho e hicieron sus primeros pasos en un mundial. C.S.: -En general, ¿hay algo que le haya llamado la atención con respecto al nivel de los otros equipos? J.M.S.: -Sí, algo que notamos es que tecnológicamente los robots adquirieron mayor envergadura, son más precisos y más veloces. En la parte de robots bípedos de la categoría HuroSot -donde nosotros no participamos pero sí lo hicieron Australia, Canadá, Corea y Singapur- notamos un desarrollo mayor. Nada que nos sorprenda, no es un salto cualitativo inmenso sino que son pequeños avances. Y yo creo que en realidad las cosas suceden así, con pequeños logros, cada tanto hay un avance que genera un hito. Esto es un poco la historia de las ciencias. Ningún investigador pretende cambiar el eje del conocimiento, le gustaría, pero en lo que se basa es en aportes que tienen un efecto multiplicador cuando se comparten y se comunican en congresos, jornadas, etcétera. Y quizás esos aportes permiten que en algún momento haya un quiebre. C.S.: -¿Cómo evalúa la experiencia del mundial de este año? J.M.S.: -Para ser honestos, el estado de ánimo que vivíamos ahí era muy fuerte. Por más que uno realmente entiende que esto es experiencia, que los propósitos del proyecto están más allá de competir en un campeonato, etcétera, uno está triste o con bronca al ver que en otras condiciones, por ejemplo de iluminación, el desempeño del equipo hubiese sido distinto. Aparecen sentimientos que no puedo negar, no sólo míos sino de todo el grupo que trabajó. Cuidaremos ese aspecto para la próxima vez. Aún así, el grupo humano fue increíble porque, pese a haber tenido la experiencia de dos reveses muy contundentes -perder 20 a 0 ó 18 a 1 contra los equipos de Corea en 7 contra 7-, la gente seguía trabajando como si nada los detuviera, con el ánimo de superarse. De hecho algunos de los problemas en el sistema de visión fueron superados. Una cosa curiosa en un partido contra Austria, en MiroSot 5 contra 5, es que hubo un robot al que el sistema de visión veía bien por la combinación de colores y la forma, y no era tan afectado por el sistema de iluminación. Y era un defensor tan impresionante que la gente del equipo alemán se acercó a felicitarnos. La experiencia fue dura desde el punto de vista de que, si uno va a competir, quiere ganar, pero lo más importante es que no hay que desviarse. Hay que evaluar un año y medio de trabajo en el que se lograron resultados muy importantes. C.S.: -La principal autocrítica ¿sería la cantidad de objetivos ambiciosos que se propusieron para esta oportunidad en particular? J.M.S.: -Un proyecto de investigación nunca termina de ser ambicioso -sería un poco soberbio pensar lo contrario-. Lo que nos pasó es que decidimos hacer muchas cosas en este último año. Esa quizás es una autocrítica: cuando uno tiene que integrar tantas innovaciones, estas pueden fallar. Eso es algo que suele suceder y que efectivamente nos sucedió. Si tenemos en cuenta solamente el plan de competir en el mundial, los objetivos fueron ambiciosos en términos del tiempo disponible -un año-. Pero no estoy arrepentido de impulsar todos estos objetivos, no los impulsé yo solo, sino también los docentes que coordinan y con los que cooperamos permanentemente. Porque, en definitiva, el fútbol de robots es una excusa para el desarrollo de la robótica y la inteligencia artificial, y en ese sentido lo tomamos. Eso provoca que algunas veces, tal como nos pasó esta vez, los resultados en la competencia puedan ser desfavorables, pero no en términos del proyecto, porque creo que hay resultados que justifican largamente lo que hacemos: tesis de licenciatura, investigadores formándose, productos desarrollados, artículos publicados, etcétera. C.S.: -¿Qué lugar ocupa el mundial de fútbol de robots en todo el proyecto UBASOT? J.M.S.: -La competencia en sí es una instancia donde hay diversos factores. Si se gana o se pierde, hay que tomarlo de la misma manera, y seguir trabajando sin perder la perspectiva. Más allá de eso, nuestro principal objetivo no es competir en campeonatos de fútbol de robots sino seguir avanzando en el conocimiento y la investigación en robótica e inteligencia artificial.
|
||||||||||||||



 J.M.S.:
-Definitivamente. Los componentes los compramos en el exterior: la
óptica en Alemania, el sensor CCD y otros componentes en Estados Unidos,
etcétera. Estos componentes se denominan de montaje superficial y
son los que no se venden acá, o en todo caso se venden en muy pocos
lugares. Uno de los problemas es el desarrollo de los circuitos impresos
para montar estos componentes en Argentina. Nosotros ya veníamos de
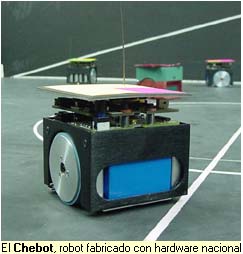
la experiencia de desarrollar los robots Chebot, que utilizamos este
año en las categorías de Robots Reales, y habíamos conseguido una
empresa argentina, DAICHI, que desarrollaba estos circuitos impresos.
Por lo cual sabíamos que eso se podía hacer, entonces nos dedicamos
a diseñar hardware. Además en robótica, cuando uno adquiere hardware,
tiene que pagar un alto valor agregado por el diseño. En nuestro país
podemos diseñar hardware, nosotros lo demostramos, y la cámara funciona
bien. La cuestión es decidirse a hacerlo, esto lleva mucho tiempo,
trabajo y dinero.
J.M.S.:
-Definitivamente. Los componentes los compramos en el exterior: la
óptica en Alemania, el sensor CCD y otros componentes en Estados Unidos,
etcétera. Estos componentes se denominan de montaje superficial y
son los que no se venden acá, o en todo caso se venden en muy pocos
lugares. Uno de los problemas es el desarrollo de los circuitos impresos
para montar estos componentes en Argentina. Nosotros ya veníamos de
la experiencia de desarrollar los robots Chebot, que utilizamos este
año en las categorías de Robots Reales, y habíamos conseguido una
empresa argentina, DAICHI, que desarrollaba estos circuitos impresos.
Por lo cual sabíamos que eso se podía hacer, entonces nos dedicamos
a diseñar hardware. Además en robótica, cuando uno adquiere hardware,
tiene que pagar un alto valor agregado por el diseño. En nuestro país
podemos diseñar hardware, nosotros lo demostramos, y la cámara funciona
bien. La cuestión es decidirse a hacerlo, esto lleva mucho tiempo,
trabajo y dinero.